Avior32 - Avionics grade redundant, intelligent IoT
- Details
- Category: Uncategorised
- Created: 28 October 2015
- Hits: 28789
Towards a More Smart Thingfor Automation in the Internetwork
|
||
|
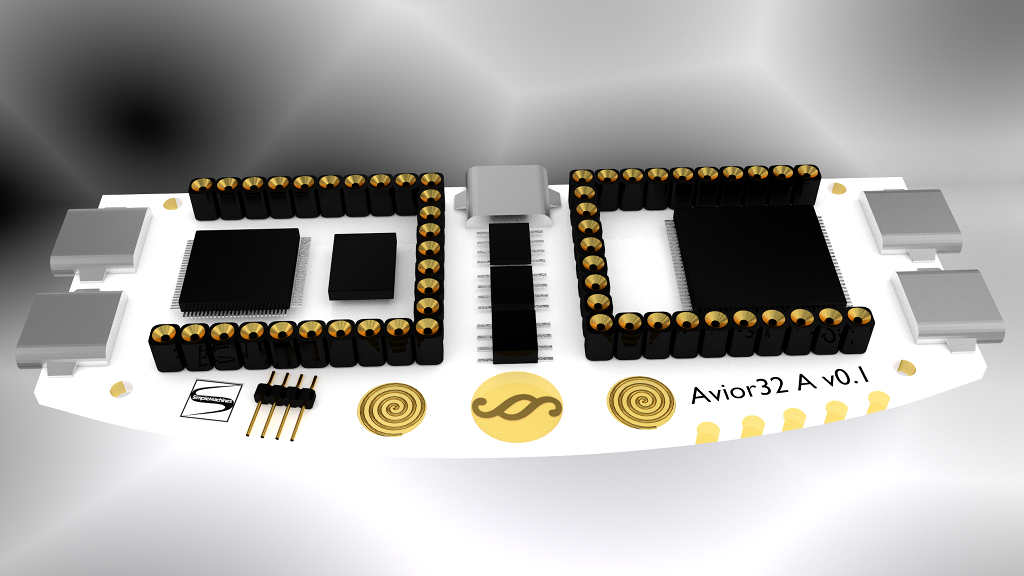
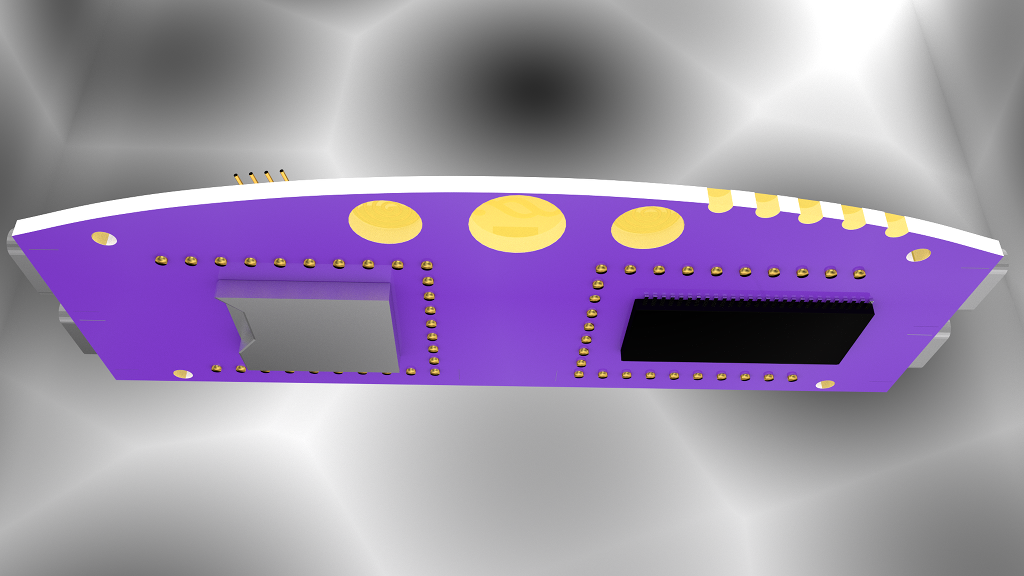
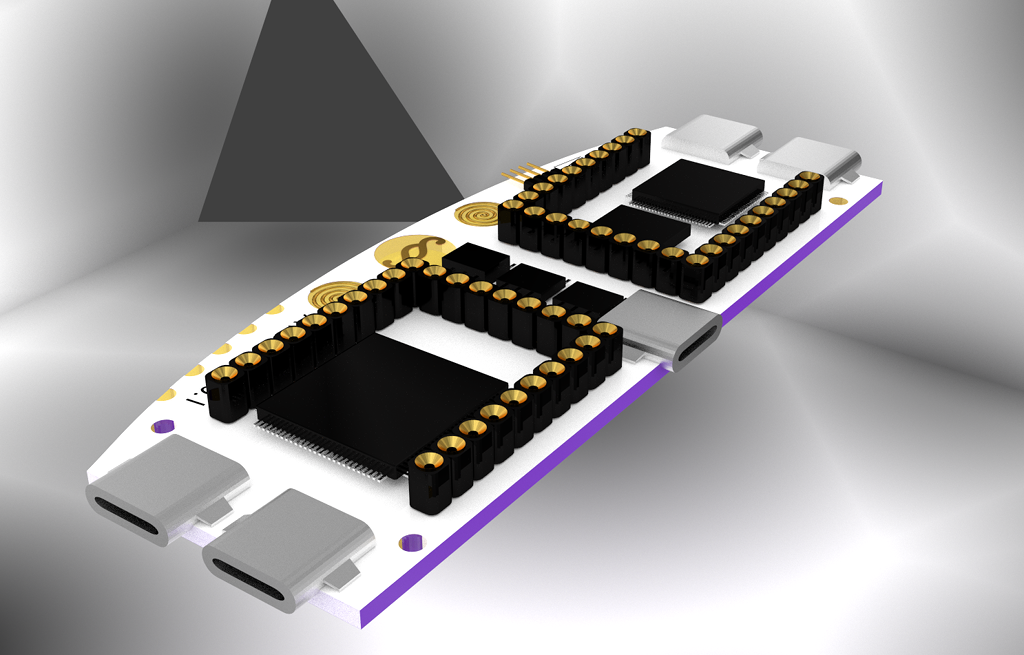
Besides its complexity, the dimension of Avior32 is set to 8.4cm x 3.4cm |
MikroBus with Arduino proportions
|
|
Avior32 in progress...
|
||
|
The Brain of Things (BoT) in the Internet of Things (IoT)BoT concept and acronym add an important feature to those interconnected and automated Things, for the interpreters involved, running on top of a real-time and multithread Toward Full-POSIX RIOT OS, the power of functional languages or languages used for artificial intelligence (like F# or LISP), while supporti concurrently very popular languages like Micro-Python, Lua,, Javascript . Source-Atoms sharing data sets talking at various speeds and media and interconnected(Ram, Flash, SPI, RS485, Wireless or distributed over iternet) for all kind of etherogeneous work or automations construct (not all building material are the same or for same purpose) done with different parts in a whole. The supported interpreters include the forgotten Forth still interpreted and dynamic but so powerful with the algorithmic speed of compiled C. Forgetting binary or keep it marginal, as it is for the (not obfuscated) Web. If not the base firmware. - Extending a node binary proof. menas: make it dynamic, responsive, changeable and never fixed. -- involve incremental and interactive programming in control, deployment, observation of a running system, a new way to development process or editing, deployment of small and large automations, with editing flow based using IBM NodeRed integrated with many of good concepts that Symbolics Genera or Lisp machines had, in One harmonized, extended, simplified form. Dissipating complexity downsides and failures. - Some make on it to depends the stability of the automation, systems small and big, wich is wrong. All should run independently at a single node level, or even inside it, on a bed of a POSIX RTOS OS. Inside a node, a bunch of them wired, as a thousand involved locally or distributed over IPv6. Relying on low cost, reduntant (even A+B ISPs or WAN) Gateways... (read well) not _concetrators_, for a strong, secure and fail safe distributed automation. Of course if some of the distributed automation is over a network, a gateway is a must. So we use it! with a full featured Debian GNU/Linux (without to reinvent the hot water), Mosh or an advanced SSH tunnel, as interface for nodered, a fork of it, an hybrid with many genera concepts built in, that solve a lot of security problems to put hands on what behind that gateway as nodes so tiny that could not be hog with control or editing interfaces, so with that, make it in simplicity and where it not harms and is obvious more resources as a way to access is located. - The Hardware: Avior5 is a demo board concept that is born to concentrate in a single miniaturized module with the stacking possibility the needed connections for batteries, solar cells, and LTO batteries (10.000 cycles of service and half cost of LiPo, stability of LiFePO4) the old but not replaceable (in terms of automation) RS485, as well as extension modules (Wi-Fi, ETH, 6LoWPaN, 868MHz, LoRa etc). Avior is fruit of very long time rearch and several revision. Is done in simplicity and modular. It consist of an adaptor with signaling, MTTP raw solar cells connections, LTO (lithium titanate - 50 years of service) cells port, and low cost (so simple, so well working) balancing and charge system. While Two Trapezium base nodes could be paired reachching common failsafe redundancy (A+B) - Avior5 goes beyond this, it can hold up to 5 Trapezium module (our smaller full functional node) to achieve Avionic or Space Station grade redundancy. Or a different way to flexibility multicore-multimodule-redundant-real-time in IoT never achieved before. Trapezium is ESP32 based (Dualcore Espressif LX6 - also used in Echo better known as Amazon Alexa), not ARM. You can access the trapezium here. With in it expressed a form factor, or a way to do a node, so small, and with Type-C, a way of simple updating, or even changing base lesstiff modules in future from 32 to 64 bits over so popular, cheap, low power, easy to source and reliable modules with all common FOSS software in the planet.
Leaving One Avior5 in a jungle, equipped with solar cells, LTO batteries, with something to do, you grant 40 years of service to your node without any human maintenance. Still admitting degadation of solar cells and the possible electronic failure of 1... to 4 nodes.
The Concept is still on Development, prior to hardware definitive design.
The cost optimization on it, can not be iterated more than this. (we reached the end of a long journey).
Supported add-in cards & Headers: Avior5 support five MikroBus-Clickboards extension sockets, other connections are handled via USB Type-C headers. The Type-C is a very well done and cheap connector, it solved also the problem since have let us to concentrate USB many signals, as well as full redundand RS485 20Mbit bus (easy translable in differential fiber optics) all over 1 single connector. I2C, power in and out, as it is important and omnipresent. Wired Networking RS485 (redundant half duplex) - Copper wires optional(simple) external SC/ST adaptor for Fiber Optics (Tao Fiber technology). Wireless Networking LoRa modules, over MikroBus. (LoRa PHY was fully decyphered, Here)
The rendering are outdated of few years :) , pls see Trapezium page to se the current node element of Avior. Avior5 Specs:
Status: Sorry for the Chaos, the Concept is not completed This project is contingent to Trapezium to be completed
Research Path in SW & HW with Sub and Meta projects: This Demo Board is connected with the Sagittarius Sub-Projects Alcor OS, and Mira Spiralcity, its decentralized distributed automation PiAutos project - Aslo involved in Mira Spiralcity Valid for IoT in general, Robots, Home automation, Industry, Smart city, and Internet "turn the PWM rotor in Japan, and close the Niagara Falls main valve" With an extensive use of IPv6, Secure DNS database, never done before. -- Please subscribe our devhw@ list to give your contribution >> here << (The list is almost desert and we are a few in the center of the ocean, so be patient to see something)
--
|
||